💡Author:信安2002钱泽枢(ShiQuLiZhi)
🚀欢迎访问我的作业合集(部分文章Latex语法支持不佳QAQ):https://sxhthreo.github.io/categories/%E4%BD%9C%E4%B8%9A/
一、矩阵的LU分解
调研学习并给出矩阵的LU分解方法。
1.1 Doolittle(杜利特尔)直接分解法
假设 $A$ 的各阶顺序主子式 $D_i\neq 0(i=1:n)$,则 $A=LU$,记
$\left(\begin{array}{cccc}
a_{11} & a_{12} & \cdots & a_{1 n} \\
a_{21} & a_{22} & \cdots & a_{2 n} \\
\vdots & \vdots & \ddots & \vdots \\
a_{n 1} & a_{n 2} & \cdots & a_{n n}
\end{array}\right)=\left(\begin{array}{cccc}
1 & & & \\
l_{21} & 1 & & \\
\vdots & \vdots & \ddots & \\
l_{n 1} & l_{n 2} & \cdots & 1
\end{array}\right)\left(\begin{array}{cccc}
u_{11} & u_{12} & \cdots & u_{1 n} \\
& u_{22} & \cdots & u_{2 n} \\
& & \ddots & \vdots \\
& & & u_{n n}
\end{array}\right)$
由矩阵乘法,得
$\left\{\begin{array}{l}
\boldsymbol{u}_{1 j}=\boldsymbol{a}_{1 j}, j=\mathbf{1}: \boldsymbol{n} \\
\boldsymbol{l}_{i 1}=\boldsymbol{a}_{i 1} / \boldsymbol{u}_{11}, i=\mathbf{2}: \boldsymbol{n}
\end{array}\right.$及$\left\{\begin{array}{l}
\boldsymbol{u}_{i j}=\boldsymbol{a}_{i j}-\sum_{k=1}^{i-1} \boldsymbol{l}_{i k} \boldsymbol{u}_{k j} \quad j=\boldsymbol{i}: \boldsymbol{n} \\
\boldsymbol{l}_{i j}=\left(\boldsymbol{a}_{i j}-\sum_{k=1}^{j-1} \boldsymbol{l}_{i k} \boldsymbol{U}_{k j}\right) / \boldsymbol{u}_{i j} \quad \boldsymbol{i}=\boldsymbol{j}+\mathbf{1}: \boldsymbol{n}
\end{array}\right.$
该分解称为Doolittle直接分解法。紧凑格式如下:
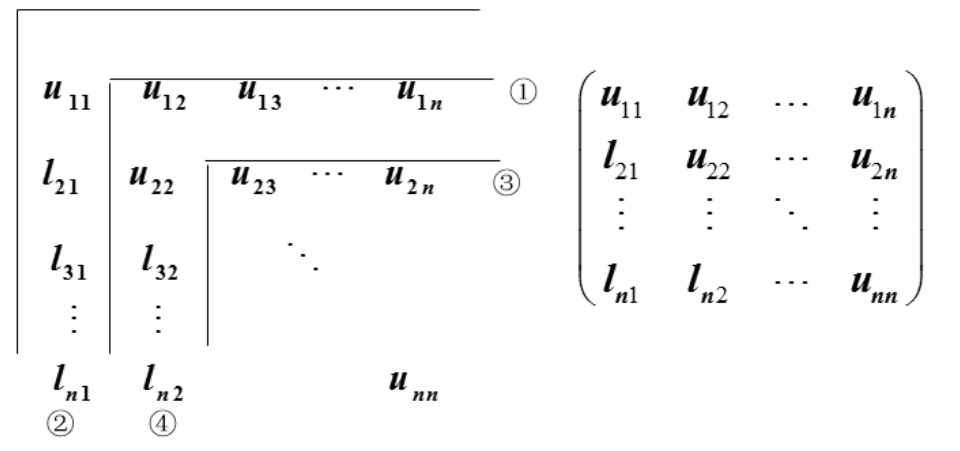
如,解线性方程组$\left[\begin{array}{llll}
1 & 0 & 2 & 0 \\
0 & 1 & 0 & 1 \\
1 & 2 & 4 & 3 \\
0 & 1 & 0 & 3
\end{array}\right]\left[\begin{array}{l}
x_{1} \\
x_{2} \\
x_{3} \\
x_{4}
\end{array}\right]=\left[\begin{array}{c}
5 \\
3 \\
17 \\
7
\end{array}\right]$
得到$A=\left[\begin{array}{llll}
1 & & & \\
0 & 1 & & \\
1 & 2 & 1 & \\
0 & 1 & 0 & 1
\end{array}\right]\left[\begin{array}{llll}
1 & 0 & 2 & 0 \\
& 1 & 0 & 1 \\
& & 2 & 1 \\
& & & 2
\end{array}\right]$
解 $Ly=b$,得 $y=(5,3,6,4)^{T}$;解 $Ux=y$,得 $x=(1,1,2,2)^{T}$
在实际代码的设计过程中,LU分解可以不需要额外的存储空间,即可把 $U$ 的非零部分存储到 $A$ 的上三角部分,把 $L$ 的非零部分存储到 $A$ 的下三角部分。
代码详见附录。
1.2 Crout(克劳特)分解
将 $A$ 分解式 $A=LU$ 中 $U(u_{ii}\neq 0,i=1:n)$ 进一步分解为
$\boldsymbol{U}=\left(\begin{array}{llll}
\boldsymbol{u}_{11} & & & \\
& \boldsymbol{u}_{22} & & \\
& & \ddots & \\
& & & \boldsymbol{u}_{n n}
\end{array}\right)\left(\begin{array}{cccc}
\mathbf{1} & u_{12} / u_{11} & \cdots & u_{1 n} / u_{11} \\
& \mathbf{1} & \cdots & u_{2 n} / u_{22} \\
& & \ddots & \vdots \\
& & & \mathbf{1}
\end{array}\right)\triangleq D \bar{U}$
则 $A=LD\bar{U}=(LD)\bar{U}\triangleq \bar{L} \bar{U}$,简记为 $A=LU$ ,其中 $L$ 是下三角矩阵,$U$ 是单位上三角矩阵。
上述分解也可记为 $A=LDU$,称为 $LDU$ 分解法。其中 $L$ 是单位下三角矩阵,$U$ 是单位上三角矩阵,$D$是对角矩阵。
我们对对称矩阵有下述定理:
若 $A\in R^{n*n}$ 是对称矩阵,且 $A$ 的顺序主子式 $D_i\neq0(i=1:n)$,则 $A$ 可唯一分解为 $A=LDL^T$,其中 $L$ 为单位下三角矩阵,$D$ 为对角矩阵。
证明:
因为 $A$ 的各阶顺序主子式都不等于零,则有 $A$ 可唯一分解为
$A=\left[\begin{array}{cccc}
1 & & & \\
l_{21} & 1 & & \\
\vdots & \vdots & \ddots & \\
l_{n 1} & l_{n 2} & \cdots & 1
\end{array}\right]\left[\begin{array}{cccc}
u_{11} & u_{12} & \cdots & u_{1 n} \\
& u_{22} & \cdots & u_{2 n} \\
& & \ddots & \vdots \\
& & & u_{n n}
\end{array}\right] \text { 且 } u_{i i} \neq 0(i=1,2, \cdots, n)$因为 $U_{ii}\neq 0(i=1,2,…,n)$,所以 $U$ 可进一步分解为 $U=\left[\begin{array}{llll}
u_{11} & & & \\
& u_{22} & & \\
& & \ddots & \\
& & & u_{n n}
\end{array}\right]\left[\begin{array}{cccc}
1 & \frac{u_{12}}{u_{11}} & \cdots & \frac{u_{1 n}}{u_{11}} \\
& 1 & \cdots & \frac{u_{2 n}}{u_{22}} \\
& & \ddots & \vdots \\
& & & 1
\end{array}\right]=D U_{1}$其中 $D$ 为对角矩阵,$U_1$为上三角阵。故 $A=LDU_1=L(DU_1)$。
由 $A$ 是对称矩阵,则 $A=A^{T}=U_{1}^{T} D^{T} L^{T}=U_{1}^{T} D L^{T}=U_{1}^{T}\left(D L^{T}\right)$
又有 $LU$ 分解唯一,则 $L=U_1^{T}$,故 $A=LDL^T$
1.3 Cholesky分解法
1.3.1 概述
Cholesky分解法又叫平方根法,是求解对称正定线性方程组最常用的方法之一。对于一般矩阵,为了消除LU分解的局限性和误差的过分积累,采用了选主元的方法,但对于对称正定矩阵而言,选主元是不必要的。
有以下定理:若 $A\in R^{nn}$ 对称正定,则存在一个对角元为正数的下三角矩阵 $L\in R^{nn}$,使得 $A=LL^{T}$ 成立。
对称:$A=A^{T}$
正定:$X^TAX>0(x\neq 0)$
假设现在要求解线性方程组 $AX=B$,其中 $A$ 为对称正定矩阵,那么 $X$ 可通过下面步骤求解:
- 求 $A$ 的Cholesky分解,得到 $A=LL^T$
- 求解 $LY=B$,得到 $Y$
- 求解 $L^TX=Y$,得到 $X$
现在的关键问题是 $A$ 对进行Cholesky分解。
1.3.2 求矩阵 $L$ 的第一列元素
假设
$L=\left(\begin{array}{cccc}
l_{11} & 0 & \cdots & 0 \\
l_{21} & l_{22} & \cdots & 0 \\
\vdots & \vdots & \ddots & \vdots \\
l_{n 1} & l_{n 2} & \cdots & l_{n n}
\end{array}\right) \quad L^{T}=\left(\begin{array}{cccc}
l_{11} & l_{21} & \cdots & l_{n 1} \\
0 & l_{22} & \cdots & l_{n 2} \\
\vdots & \vdots & \ddots & \vdots \\
0 & 0 & \cdots & l_{n n}
\end{array}\right)$
通过比较 $A = LL^T$ 比较两边的关系,首先由 $a_11=l_{11}^2$,得到 $l_{11}=\sqrt{a_{11}}$,再由 $a_{i1}=l_{11}l_{i1}$,得到
$l_{i1}=\frac{a_{i1}}{l_{11}}(i=2,3,…,n)$
这样就得到了矩阵 $L$ 的第一列元素。
1.3.3 求矩阵 $L$ 的第 $k$ 列元素
假定已经算出了 $L$ 的前 $k-1$ 列元素,通过$a_{k k}=\sum_{i=1}^{k} l_{k i}^{2}$,可以得到$l_{k k}=\sqrt{a_{k k}-\sum_{i=1}^{k-1} l_{k i}^{2}}$。
进一步再由$a_{i k}=\sum_{j=1}^{k-1} l_{i j} l_{k j}+l_{i k} l_{k k} \quad(i=k+1, \ldots, n)$,最终得到:
$l_{i k}=\frac{a_{i k}-\sum_{j=1}^{k-1} l_{i j} l_{k j}}{l_{k k}} \quad(i=k+1, \ldots, n)$
这样便通过 $L$ 的前 $k-1$ 列求出了第 $k$ 列,一直递推下去即可求出 $L$ ,这种方法称为Cholesky分解法。
代码详见附录。
1.3.4 改进版本
用上述的方法进行LU分解时需要进行开方运算,这有可能损失精度和增加运算量,为了避免开方,Cholesky分解有个改进的版本。
将对称正定矩阵通过分解成 $A=LDL^{T}$ ,其中 $L$ 是单位下三角矩阵,$D$是对角均为正数的对角矩阵。把这一分解叫做 $LDL^T$分解,是Cholesky分解的变形。对应两边的元素,很容易得到:
$a_{i j}=\sum_{k=1}^{j-1} l_{i k} d_{k} l_{j k}+l_{i j} d_{j} \quad(1 \leq j \leq i \leq n)$
由此可以确定计算 $l_{ij}$ 和 $d_j$ 的公式如下:
- $u_{k}=d_{k} l_{j k} (k=1,2, \ldots, j-1)$
- $d_{j}=a_{j j}-\sum_{k=1}^{j-1} l_{j k} u_{k}$
- $l_{i j}=\frac{a_{i j}-\sum_{k=1}^{j-1} l_{i k} u_{k}}{d_{j}} \quad(i=j+1, \ldots, n)$
在实际计算时,是将 $L$ 的严格下三角元素存储在的对应位置上,而将 $D$ 的对角元存储在 $A$ 的对应对角位置上。
类似地,该方法求解线性方程组 $AX=B$ 的解的步骤如下:
- 对矩阵进行分解得到
- 求解 $LY=B$,得到 $Y$
- 求解 $DL^TX=Y$,得到 $X$
代码详见附录。
高斯消去法的现代商业实现是以LU分解为基础的。
二、可逆矩阵的逆
给出方案计算可逆矩阵的逆。
2.1 待定系数法
设 $A$ 是一个 $n$ 阶方阵,若存在另一个 $n$ 阶方阵 $B$,使得 $AB=BA=E$,则称方阵 $A$ 可逆,并称方阵 $B$ 是 $A$ 的逆矩阵。
我们可以根据定义,用待定系数法求逆矩阵:
矩阵$A=\left(\begin{array}{ll}
1 & 2 \\
-1 & -3
\end{array}\right)$,假设所求的逆矩阵为$\left(\begin{array}{ll}
a & b \\
c & d
\end{array}\right)$,则有:$\left(\begin{array}{ll}
1 & 2 \\
-1 & -3
\end{array}\right)\left(\begin{array}{ll}
a+2c & b+2d \\
-a-3c & -b-3d
\end{array}\right)=\left(\begin{array}{ll}
1 & 0 \\
0 & -1
\end{array}\right)$
得到方程组:
$\begin{cases}
a + 2c = 1\\b + 2d = 0\-a - 3c = 0\-b - 3d = 1\end{cases}$
解得
$\begin{cases}
a = 3\\b = 2\\c = -1\\d = -1\end{cases}$
2.2 伴随矩阵法
设矩阵 ,将矩阵
,将矩阵 的元素
的元素 所在的第 $i$ 行第 $j$ 列元素划去后,剩余的各元素按原来的排列顺序组成的 $n-1$ 阶矩阵所确定的行列式称为元素的余子式,记为
所在的第 $i$ 行第 $j$ 列元素划去后,剩余的各元素按原来的排列顺序组成的 $n-1$ 阶矩阵所确定的行列式称为元素的余子式,记为 ,称
,称

为元素的代数余子式。
方阵的各元素的代数余子式 所构成的如下矩阵
所构成的如下矩阵

$A^*$ 称为 $A$ 的伴随矩阵。
伴随矩阵法求逆矩阵的方法为:若 $|A|\neq 0$,则 $A^{-1}=\frac{A^*}{|A|}$
如,求 $A=\left(\begin{array}{ll}
a & b \\
c & d
\end{array}\right)$的逆矩阵,有
$\begin{array}{l}
A^{-1}=\frac{1}{a d-b c}\left(\begin{array}{cc}
d & -b \\
-c & a
\end{array}\right) \\
=\left(\begin{array}{cc}
\frac{d}{a d-b c} & -\frac{b}{a d-b c} \\
-\frac{c}{a d-b c} & \frac{a}{a d-b c}
\end{array}\right)
\end{array}$
引入伴随矩阵更多是为了说明逆矩阵的存在性,除了二阶矩阵,一般不用其求具体矩阵的逆矩阵。
代码设计如下:
typedef vector<double> vec;
typedef vector<vec> mat;
mat cutoff(mat A, int i, int j) { //切割,划去第1行第i列
mat B(A.size() - 1, vec(A.size() - 1));
for(int c = 0; c < B.size(); c++)
for(int r = 0; r < B.size(); r++)
B[c][r] = A[c + (c >= i)][r + (r >= j)];
return B;
}
double det(mat A) {
if(A.size() == 1)
return A[0][0]; //当A为一阶矩阵时,直接返回A中唯一的元素
double ans = 0;
for(int j = 0; j < A.size(); j++)
ans += A[0][j] * det(cutoff(A, 0, j)) * (j % 2 ? -1 : 1);
return ans;
}
mat company_mat(mat A) {
mat B(A.size(), vec(A.size()));
for(int i = 0; i < B.size(); i++)
for(int j = 0; j < B.size(); j++)
B[j][i] = det(cutoff(A, i, j)) * ((i + j) % 2 ? -1 : 1);
return B;
}
void output(mat A) {
cout << "......\n";
for(int i = 0; i < A.size(); i++) {
for(int j = 0; j < A[0].size(); j++)
printf("%.2lf ", A[i][j]);
cout << '\n';
}
cout << "......\n";
}
mat num_mul(mat A, double num) {
mat B(A.size(), vec(A[0].size()));
for(int i = 0; i < B.size(); i++)
for(int j = 0; j < B[0].size(); j++)
B[i][j] = A[i][j] * num;
return B;
}2.3 初等变换法
我们有以下结论:对于一个矩阵的初等行变换,有三种:
- 交换两行;
- 将某一行的所有元素乘以一个非零实数 $k$;
- 将某一行 $j$,加上某一行 $i(i≠j)$ 乘以一个非零实数 $k$,即$A_j=A_j+A_i∗k$。
可以发现的是,每种变换其实都可以等价于乘以某个矩阵,事实上称其为初等矩阵。则我们可以通过初等行变换求出可逆矩阵的逆:
设 $A$ 为可逆矩阵,则 $\left(\begin{array}{ll}
A & I
\end{array}\right) \stackrel{\text { 初等行变换 }}{\longrightarrow}\left(I \quad A^{-1}\right)$
例如,我们求$A=\left(\begin{array}{ccccc}
1 & 1 & \cdots & \cdots & 1 \\
1 & 0 & 1 & \cdots & 1 \\
& & \ddots & & \\
1 & & \cdots & 0 & 1 \\
1 & & \cdots & 1 & 0
\end{array}\right)$的逆,可以进行以下的初等行变换:
$\left(\begin{array}{ccccccccc}
1 & 1 & \cdots & \cdots & 1 & 1 & & & \\
1 & 0 & 1 & \cdots & 1 & & 1 & & \\
1 & 1 & 0 & 1 & 1 & & & \cdots & \\
& & & & & & & & \\
1 & 1 & \cdots & 1 & 0 & & & & 1
\end{array}\right) \rightarrow$
$\left(\begin{array}{ccccccccc}
1 & 1 & \cdots & \cdots & 1 & 1 & & & \\
0 & -1 & 0 & \cdots & 0 & -1 & 1 & & \\
0 & 0 & -1 & 0 & 0 & -1 & & \cdots & \\
& & & & & & & & \\
0 & 0 & \cdots & 0 & -1 & -1 & & & 1
\end{array}\right) \rightarrow$
$\left(\begin{array}{cccccccccc}
1 & 0 & \cdots & \cdots & 0 & -(n-2) & 1 & \cdots & \cdots & 1 \\
0 & 1 & 0 & \cdots & 0 & 1 & -1 & & & \\
0 & 0 & 1 & 0 & 0 & 1 & & \cdots & & \\
& & & & & & & & & \\
0 & 0 & \cdots & 0 & 1 & 1 & & & & -1
\end{array}\right)$
故 $A^{-1}=\left(\begin{array}{ccccc}
-(n-2) & 1 & \cdots & \cdots & 1 \\
1 & -1 & & & \\
\vdots & & -1 & & \\
1 & & & & \\
1 & & & \cdots & \\
1 & & & & -1
\end{array}\right)$
初等行变换求逆矩阵的代码详见附录。
运行结果如下:
Input:
—-行列数:3
输入行列式:
1 0 0
2 1 0
5 4 1Output:
|A|=1
(A|E)=
| 1 0 0 | 1 0 0 |
| 2 1 0 | 0 1 0 |
| 5 4 1 | 0 0 1 |R2-2R1:
| 1 0 0 | 1 0 0 |
| 0 1 0 | -2 1 0 |
| 5 4 1 | 0 0 1 |R3-5R1:
| 1 0 0 | 1 0 0 |
| 0 1 0 | -2 1 0 |
| 0 4 1 | -5 0 1 |R3-4R2:
| 1 0 0 | 1 0 0 |
| 0 1 0 | -2 1 0 |
| 0 0 1 | 3 -4 1 |Result:
| 1 0 0 |
| -2 1 0 |
| 3 -4 1 |
用初等行变换法求逆矩阵具有普适性。
附:源代码
Doolittle(杜利特尔)直接分解法
#include <stdio.h>
#include <stdlib.h>
double sumU(double L[4][4] ,double U[4][4], int i, int j ){
double sU = 0.0;
for (int k = 1; k <= i-1 ; k++)
{
sU += L[i-1][k-1] * U[k-1][j-1];
}
return sU;
} //计算求和1
double sumL(double L[4][4] ,double U[4][4], int i, int j ){
double sL = 0.0;
for (int k = 0; k <= j-1; k++)
{
sL += L[i-1][k-1] * U[k-1][j-1];
}
return sL;
} //计算求和2
double sumY(double L[4][4] ,double y[4],int i){
double sY=0.0;
for (int k = 1; k <= i - 1; k++)
{
sY += L[i-1][k-1] * y[k-1];
}
return sY;
} //计算求和3
double sumX(double U[4][4] ,double x[4],int i ,int m){
double sX = 0.0;
for (int k = i+1; k <= m; k++)
{
sX += U[i-1][k-1] * x[k-1];
}
return sX;
} //计算求和4
int main(){
double a[4][4] = { {1,2,3,1,},
{1,4,1,-1,},
{1,-1,-2,3,},
{1,3,-1,2}};//将系数存入二维数组
double L[4][4] = {0};
double U[4][4] = {0};//初始化部分
double b[4] = {8,8,12,19};
int n = 4;//n阶
//输出[Ab]
printf("[A]:\n");
for (int i = 1; i <= n; i++)
{
for (int j = 1; j <= n; j++)
{
printf("%f\t", a[i-1][j-1]);
}
printf("\n");
}
//计算L,U
for (int i = 1; i <= n; i++)
{
L[i-1][i-1] = 1;//对角线元素为1
for (int j = i; j <= n; j++)
{
//由于数组下标从0开始 所以i-1,j-1
U[i-1][j-1] = a[i-1][j-1] - sumU(L,U,i,j);
if(j+1 <= n) L[j][i-1] = (a[j][i-1] - sumL(L,U,j+1,i))/U[i-1][i-1];//i变j+1,j变i
}
}
//输出U
printf("U:\n");
for (int i = 1; i <= n; i++)
{
for (int j = 1; j <= n; j++)
{
printf("%f\t",U[i-1][j-1]);
}
printf("\n");
}
//输出L
printf("L:\n");
for (int i = 1; i <= n; i++)
{
for (int j = 1; j <= n; j++)
{
printf("%f\t",L[i-1][j-1]);
}
printf("\n");
}
//由Ly=b 求y
double y[4] = {0.0};
y[0] = b[0];//y(1) = b(1);
for (int i = 2; i <= n; i++)
{
y[i-1] = b[i-1] - sumY(L,y,i);
}
//由 Ux=y 求x
double x[4] = {0.0};
for (int i = n; i >= 1; i--)
{
x[i-1] =( y[i-1] - sumX(U,x,i,n))/ U[i-1][i-1];
}
//输出y
printf("y:\n");
for (int i = 0; i < n; i++)
{
printf("%f\n",y[i]);
}
printf("\n");
//输出x
printf("x:\n");
for (int i = 0; i < n; i++)
{
printf("%f\n",x[i]);
}
printf("\n");
system("pause");
return 0;
}Cholesky分解法
#include <iostream>
#include <string.h>
#include <stdio.h>
#include <vector>
#include <math.h>
using namespace std;
const int N = 1005;
typedef double Type;
Type A[N][N], L[N][N];
/** 分解A得到A = L * L^T */
void Cholesky(Type A[][N], Type L[][N], int n)
{
for(int k = 0; k < n; k++)
{
Type sum = 0;
for(int i = 0; i < k; i++)
sum += L[k][i] * L[k][i];
sum = A[k][k] - sum;
L[k][k] = sqrt(sum > 0 ? sum : 0);
for(int i = k + 1; i < n; i++)
{
sum = 0;
for(int j = 0; j < k; j++)
sum += L[i][j] * L[k][j];
L[i][k] = (A[i][k] - sum) / L[k][k];
}
for(int j = 0; j < k; j++)
L[j][k] = 0;
}
}
/** 回带过程 */
vector<Type> Solve(Type L[][N], vector<Type> X, int n)
{
/** LY = B => Y */
for(int k = 0; k < n; k++)
{
for(int i = 0; i < k; i++)
X[k] -= X[i] * L[k][i];
X[k] /= L[k][k];
}
/** L^TX = Y => X */
for(int k = n - 1; k >= 0; k--)
{
for(int i = k + 1; i < n; i++)
X[k] -= X[i] * L[i][k];
X[k] /= L[k][k];
}
return X;
}
void Print(Type L[][N], const vector<Type> B, int n)
{
for(int i = 0; i < n; i++)
{
for(int j = 0; j < n; j++)
cout<<L[i][j]<<" ";
cout<<endl;
}
cout<<endl;
vector<Type> X = Solve(L, B, n);
vector<Type>::iterator it;
for(it = X.begin(); it != X.end(); it++)
cout<<*it<<" ";
cout<<endl;
}
int main()
{
int n;
cin>>n;
memset(L, 0, sizeof(L));
for(int i = 0; i < n; i++)
{
for(int j = 0; j < n; j++)
cin>>A[i][j];
}
vector<Type> B;
for(int i = 0; i < n; i++)
{
Type y;
cin>>y;
B.push_back(y);
}
Cholesky(A, L, n);
Print(L, B, n);
return 0;
}改进版本:
#include <iostream>
#include <string.h>
#include <stdio.h>
#include <vector>
#include <math.h>
using namespace std;
const int N = 1005;
typedef double Type;
Type A[N][N], L[N][N], D[N][N];
/** 分解A得到A = LDL^T */
void Cholesky(Type A[][N], Type L[][N], Type D[][N], int n)
{
for(int k = 0; k < n; k++)
{
for(int i = 0; i < k; i++)
A[k][k] -= A[i][i] * A[k][i] * A[k][i];
for(int j = k + 1; j < n; j++)
{
for(int i = 0; i < k; i++)
A[j][k] -= A[j][i] * A[i][i] * A[k][i];
A[j][k] /= A[k][k];
}
}
memset(L, 0, sizeof(L));
memset(D, 0, sizeof(D));
for(int i = 0; i < n; i++)
{
D[i][i] = A[i][i];
L[i][i] = 1;
}
for(int i = 0; i < n; i++)
{
for(int j = 0; j < i; j++)
L[i][j] = A[i][j];
}
}
void Transposition(Type L[][N], int n)
{
for(int i = 0; i < n; i++)
{
for(int j = 0; j < i; j++)
swap(L[i][j], L[j][i]);
}
}
void Multi(Type A[][N], Type B[][N], int n)
{
Type **C = new Type*[n];
for(int i = 0; i < n; i++)
C[i] = new Type[n];
for(int i = 0; i < n; i++)
{
for(int j = 0; j < n; j++)
{
C[i][j] = 0;
for(int k = 0; k < n; k++)
C[i][j] += A[i][k] * B[k][j];
}
}
for(int i = 0; i < n; i++)
{
for(int j = 0; j < n; j++)
B[i][j] = C[i][j];
}
for(int i = 0; i < n; i++)
{
delete[] C[i];
C[i] = NULL;
}
delete C;
C = NULL;
}
/** 回带过程 */
vector<Type> Solve(Type L[][N], Type D[][N], vector<Type> X, int n)
{
/** LY = B => Y */
for(int k = 0; k < n; k++)
{
for(int i = 0; i < k; i++)
X[k] -= X[i] * L[k][i];
X[k] /= L[k][k];
}
/** DL^TX = Y => X */
Transposition(L, n);
Multi(D, L, n);
for(int k = n - 1; k >= 0; k--)
{
for(int i = k + 1; i < n; i++)
X[k] -= X[i] * L[k][i];
X[k] /= L[k][k];
}
return X;
}
void Print(Type L[][N], Type D[][N], const vector<Type> B, int n)
{
for(int i = 0; i < n; i++)
{
for(int j = 0; j < n; j++)
cout<<L[i][j]<<" ";
cout<<endl;
}
cout<<endl;
vector<Type> X = Solve(L, D, B, n);
vector<Type>::iterator it;
for(it = X.begin(); it != X.end(); it++)
cout<<*it<<" ";
cout<<endl;
}
int main()
{
int n;
cin>>n;
memset(L, 0, sizeof(L));
for(int i = 0; i < n; i++)
{
for(int j = 0; j < n; j++)
cin>>A[i][j];
}
vector<Type> B;
for(int i = 0; i < n; i++)
{
Type y;
cin>>y;
B.push_back(y);
}
Cholesky(A, L, D, n);
Print(L, D, B, n);
return 0;
}伴随矩阵法求逆矩阵
#include<iostream>
#include<vector>
using namespace std;
typedef vector<double> vec;
typedef vector<vec> mat;
mat cutoff(mat A, int i, int j) { //切割,划去第1行第i列
mat B(A.size() - 1, vec(A.size() - 1));
for(int c = 0; c < B.size(); c++)
for(int r = 0; r < B.size(); r++)
B[c][r] = A[c + (c >= i)][r + (r >= j)];
return B;
}
double det(mat A) {
if(A.size() == 1)
return A[0][0]; //当A为一阶矩阵时,直接返回A中唯一的元素
double ans = 0;
for(int j = 0; j < A.size(); j++)
ans += A[0][j] * det(cutoff(A, 0, j)) * (j % 2 ? -1 : 1);
return ans;
}
mat company_mat(mat A) {
mat B(A.size(), vec(A.size()));
for(int i = 0; i < B.size(); i++)
for(int j = 0; j < B.size(); j++)
B[j][i] = det(cutoff(A, i, j)) * ((i + j) % 2 ? -1 : 1);
return B;
}
void output(mat A) {
cout << "......\n";
for(int i = 0; i < A.size(); i++) {
for(int j = 0; j < A[0].size(); j++)
printf("%.2lf ", A[i][j]);
cout << '\n';
}
cout << "......\n";
}
mat num_mul(mat A, double num) {
mat B(A.size(), vec(A[0].size()));
for(int i = 0; i < B.size(); i++)
for(int j = 0; j < B[0].size(); j++)
B[i][j] = A[i][j] * num;
return B;
}
int main() {
int n;
scanf("%d", &n); //输入阶数
if(n == 0)
return 0;
mat A(n, vec(n));
for(int i = 0; i < n; i++)
for(int j = 0; j < n; j++)
scanf("%lf", &A[i][j]); //输入A各行各列的元素
mat B = num_mul(company_mat(A), 1 / det(A));
output(B);
return 0;
}初等变换法求逆矩阵
#include<iostream>
#include<iomanip>
using namespace std;
//左下角变换0 若对角不为1元素下方元素为1交换两行
//对角变1
//右上角变换0
void LD_triangle(float temp[6][12],int n);
void RU_triangle(float temp[6][12],int n);
void Aii_Cto_1(float temp[6][12],int n);
void Display(float A[6][12],int m,int n);
int Find(float temp[6][12],int i,int n);
void Swap(float temp[6][12],int i,int j,int n);
class Matrix{
public:
Matrix(){
n=9;
for(int i=0;i<6;i++)
for(int j=0;j<12;j++)
A[i][j]=0;
Det_A=0;
}
void Conversion();
void Input();
bool Cal_DetA();
friend void Save_To_Result(float temp[6][12],Matrix &D);
void Cheak_IsSolvable();
void Out_Result();
private:
int n; //阶
float A[6][12]; //矩阵
float result[6][6]; //逆矩阵结果
float Det_A; //|A|值 :是否存在逆矩阵
};
int main(){
cout<<"\n\t\t-------求逆矩阵(初等变换法)-------"<<endl<<endl;
while(1){
Matrix D;
D.Input();
D.Cheak_IsSolvable(); //可解
D.Conversion(); //变换
D.Out_Result(); //输出
}
return 1;
}
void Matrix::Input(){
cout<<"\n---行列数:";
cin>>n;
cout<<endl<<"输入行列式:"<<endl;
for(int i=0;i<n;i++)
for(int j=0;j<n;j++)
cin>>A[i][j];
int j=0;
for(i=n;i<2*n;i++){
A[j][i]=1;
j++;
}
}
void Matrix::Cheak_IsSolvable(){
while(1){
if(Cal_DetA()){
cout<<"\n|A|="<<Det_A<<endl<<endl;
cout<<"(A|E)="<<endl;
Display(A,n,2*n);
break;
}
else{
cout<<"此矩阵的行列式为0,无解"<<endl;
Input();
}
}
}
void Matrix::Conversion(){
float temp[6][12];
for(int i=0;i<n;i++)//替身
for(int j=0;j<2*n;j++)
temp[i][j]=A[i][j];
LD_triangle(temp,n);//左下角变换0
Aii_Cto_1(temp,n); //对角变1
RU_triangle(temp,n);//右上角变换
Save_To_Result(temp,*this);
}
void LD_triangle(float temp[6][12],int n){
for(int i=0;i<n-1;i++){
if(temp[i][i]){//对角线元素不为0
if(temp[i][i]!=1.0)
if(int j=Find(temp,i,n)) Swap(temp,i,j,n);
for(int m=i+1;m<n;m++){
if(temp[m][i]){
float t=-(temp[m][i])/temp[i][i];
for(int p=0;p<2*n;p++){//R(m)+tRi
temp[m][p]=temp[m][p]+t*temp[i][p];
}
if(t>0)
cout<<"R"<<m+1<<"+"<<t<<"R"<<i+1<<":"<<endl;
else
cout<<"R"<<m+1<<t<<"R"<<i+1<<":"<<endl;
Display(temp,n,2*n);
}
else continue;
}
}
else {//若对角线元素为0
int m; for(m=i+1;m<n;m++){//
if(temp[m][i]){//使对角线元素非0
for(int p=0;p<n;p++)//Ri+Rm
temp[i][p]=temp[m][p]+temp[i][p];
break;
}
else continue;
}
if(m==n){ //可逆矩阵 不会出现此情况(对角元素为零,且此元素以下全为零)
//此情况 矩阵 行列式值为0
}
cout<<"R"<<i+1<<"+"<<"R"<<m+1<<endl;
Display(temp,n,2*n);
i--;
}
}
}
int Find(float temp[6][12],int i,int n){
for(int m=i+1;m<n;m++)
if(temp[m][i]==1.0)
return m;
return 0;
}
void Swap(float temp[6][12],int i,int j,int n){
cout<<"R"<<i+1<<"<-->R"<<j+1<<endl;
for(int m=0;m<2*n;m++){
temp[i][m]+=temp[j][m];
temp[j][m]=temp[i][m]-temp[j][m];
temp[i][m]-=temp[j][m];
}
Display(temp,n,2*n);
}
void Aii_Cto_1(float temp[6][12],int n){
for(int i=0;i<n;i++){
if(temp[i][i]!=1.0){
float t=1.0/temp[i][i];
cout<<"R"<<i+1<<"/"<<temp[i][i]<<endl;
for(int p=0;p<2*n;p++){//R(m)+tRi
temp[i][p]*=t;
}
Display(temp,n,2*n);
}
}
}
void RU_triangle(float temp[6][12],int n){
for(int i=n-1;i>0;i--){
for(int m=i-1;m>=0;m--){
if(temp[m][i]){
float t=-(temp[m][i])/(temp[i][i]);
for(int p=i;p<2*n;p++){ //R(m)+tempRi
temp[m][p]=temp[m][p]+t*temp[i][p];
}
if(t>0)
cout<<"R"<<m+1<<"+"<<t<<"R"<<i+1<<":"<<endl;
else
cout<<"R"<<m+1<<t<<"R"<<i+1<<":"<<endl;
Display(temp,n,2*n);
}
else continue;
}
}
}
void Display(float A[6][12],int m,int n){
for(int i=0;i<m;i++){
cout<<"|";
for(int j=0;j<n;j++){
cout<<setw(8)<<A[i][j];
if((j+1)%m==0)
cout<<" |";
}
cout<<endl;
}
cout<<endl;
}
void Save_To_Result(float temp[6][12],Matrix &D){
for(int i=0;i<D.n;i++)
for(int j=D.n;j<2*D.n;j++)
D.result[i][j-D.n]=temp[i][j];
}
bool Matrix::Cal_DetA(){
float temp[6][6];
for(int i=0;i<n;i++)
for(int j=0;j<n;j++)
temp[i][j]=A[i][j];
for(i=0;i<n-1;i++){
if(temp[i][i]){//对角线元素不为0
for(int m=i+1;m<n;m++){
if(temp[m][i]){
float tem=-(temp[m][i])/temp[i][i];
for(int p=0;p<n;p++)//R(m)+tempRi
temp[m][p]=temp[m][p]+tem*temp[i][p];
}
else continue;
}
}
else {//若对角线元素为0
int m;
for(m=i+1;m<n;m++){//
if(temp[m][i]){//使对角线元素非0
for(int p=0;p<n;p++)//Ri+Rm
temp[i][p]=temp[m][p]+temp[i][p];
break;
}
else continue;
}
if(m==n){
Det_A=0;
return false;
}
i--;
}
}
Det_A=temp[0][0];//求对角积
for(i=1;i<n;i++)
Det_A=Det_A*temp[i][i];
if(Det_A) return true;
else return false;
}
void Matrix::Out_Result(){
cout<<"Result:"<<endl;
for(int i=0;i<n;i++){
cout<<"|";
for(int j=0;j<n;j++){
cout<<setw(8)<<result[i][j];
}
cout<<" |"<<endl;
}
cout<<endl;
}
